¿QUÉ ESTÁS BUSCANDO?

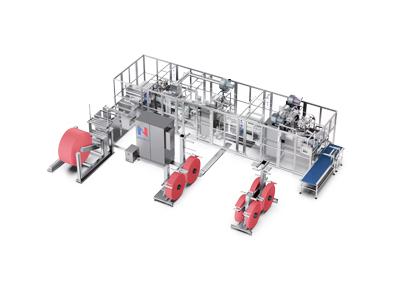
Máquina para paletizar y cargar cemento en sacos

La máquina automática de paletización y carga de cemento en sacos de la fábrica Gachn utiliza tecnología de escaneo 3D, que permite localizar y escanear con precisión la forma externa del vehículo para lograr una posición de carga precisa, un enclavamiento interactivo entre el sistema de carga y la máquina de envasado, y una carga automática.
Nombre del producto :
Bagged Cement Palletizing And Loading MachineNúmero de artículo :
FK008-IIPedido (cantidad mínima de pedido) :
1Pago :
30% advance payment, 70% balance before shipment or negotiableOrigen del producto :
xiamen,chinaPuerto marítimo :
XIAMEN or Or according to your needsPlazo de entrega :
3 monthsMáquina para paletizar y cargar cemento en sacos
El cemento ensacado original salía de la fábrica principalmente mediante carga manual o con equipos de carga semiautomáticos, y se requería mano de obra para recibir los materiales. Ante la escasez de mano de obra y el aumento de los costos laborales, las empresas necesitan sistemas de carga totalmente automáticos que reemplacen la mano de obra manual y permitan ahorrar costos. Durante el proceso de ensacado del cemento, los trabajadores se encuentran en un ambiente con gran cantidad de polvo, lo que aumenta el riesgo de enfermedades laborales como la neumoconiosis.

El robot cargador es, en realidad, una aplicación del manipulador en el sistema de ensacado de cemento. El manipulador ofrece un control preciso que mejora la eficiencia, reduce la carga de trabajo de los operarios, optimiza el entorno laboral y disminuye el consumo energético. Su uso ha liberado mano de obra y ha desempeñado un papel fundamental en el desarrollo del sector. El cargador de cemento totalmente automático se adapta a diferentes tipos de vehículos y realiza la carga automáticamente. Su sistema de reconocimiento utiliza láser y escaneo 3D para obtener información del vehículo, y el sistema de posicionamiento obtiene la ubicación del vehículo mediante múltiples sensores láser. El robot combina esta información para agarrar, planificar y ensacar automáticamente los sacos de cemento.
Principio de funcionamiento deAgente del sistema automático de carga de cemento en sacos Cargador de cemento del grupo Gachn
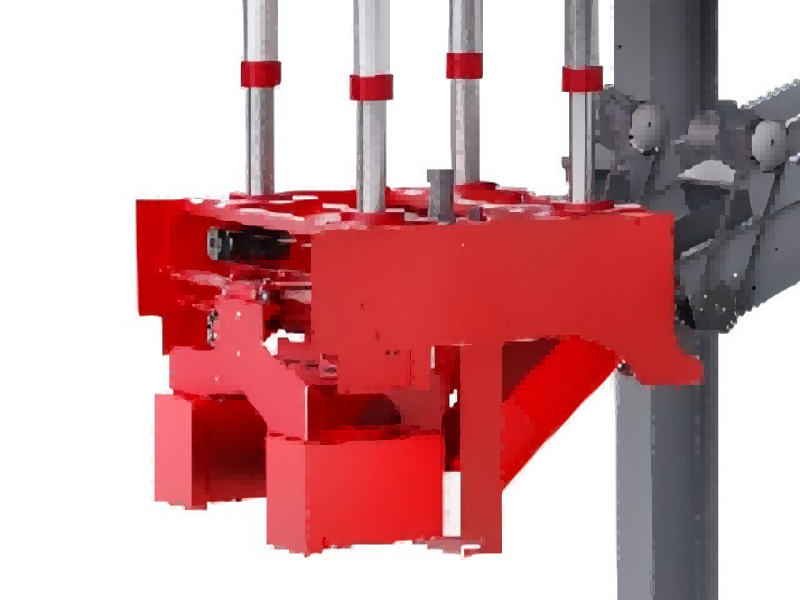
La máquina automática de paletización y carga de cemento ensacado, modelo Factory Gachn gourp loader, utiliza tecnología de escaneo 3D para localizar y escanear con precisión la forma externa del vehículo, logrando así una posición de carga exacta, un enclavamiento interactivo entre el sistema de carga y la máquina de envasado, y una carga automática. La capacidad de desplazamiento libre del Gachn gourp loader en espacios reducidos se debe a que emplea un polipasto con un mecanismo telescópico tridimensional para controlar el modelado y coordinar el funcionamiento de los mecanismos de los ejes X, Y y Z.
Sistema de eliminación de polvo
El sistema automático de carga de cemento ensacado Dealer Gachn gourp loader está equipado con un sistema de extracción de polvo, que consta de una campana extractora, una tubería de extracción de polvo y una máquina extractora de polvo, lo que reduce considerablemente la cantidad de polvo que se genera durante el proceso de carga. La mayoría de las plantas de cemento ya cuentan con sistemas de extracción de polvo y solo requieren modificar las tuberías antes de su uso.
El colector de polvo puede procesar un volumen de aire de hasta: 100000 m³/h

El cargador automático de cemento Gachn Group puede completar el embalaje.
1. Material de carga: cemento en sacos
2. Especificaciones del cemento en sacos: 50 kg/saco, 650 mm (largo) × 400 mm (ancho) × 140 mm (espesor)
3. Velocidad de embolsado de la máquina: 120 t/h
4. Capacidad del cargador automático: ≥90 t/h
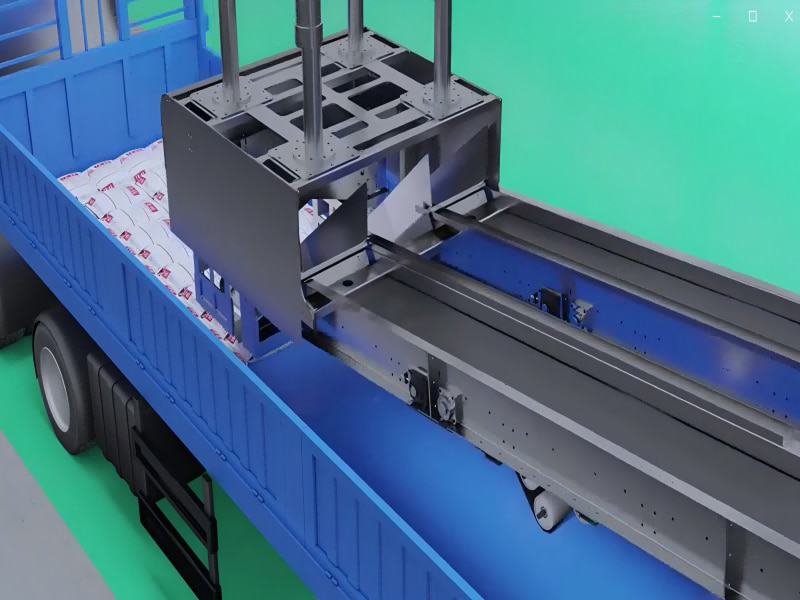
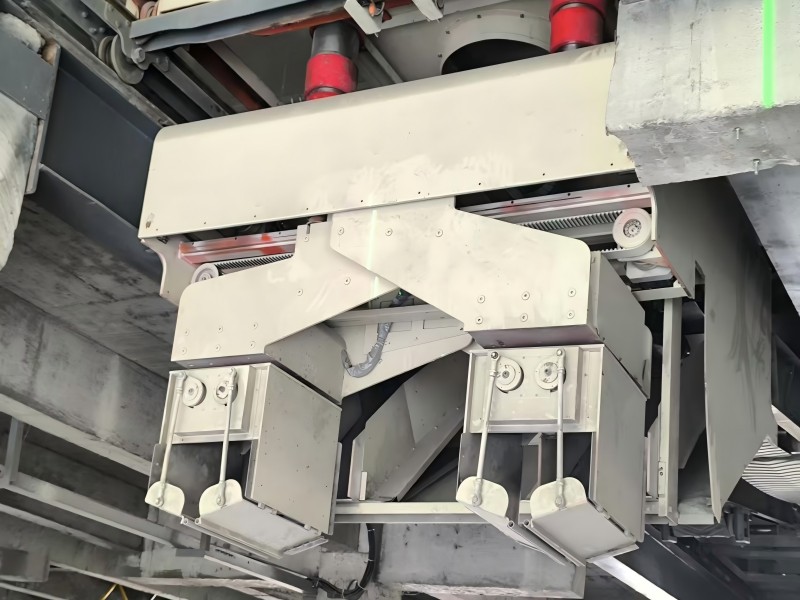
Cargando host
El mecanismo de recolección de polvo en la cabeza del robot cargador consta de un mecanismo de fijación de tubería telescópica, un conducto de aire telescópico, una canaleta de recolección de polvo, un conducto de recolección de polvo vertical y otros mecanismos. El conducto de recolección de polvo vertical y la parte delantera del vehículo entran completamente en el compartimento de carga, lo que garantiza una recolección de polvo rápida y sin residuos.
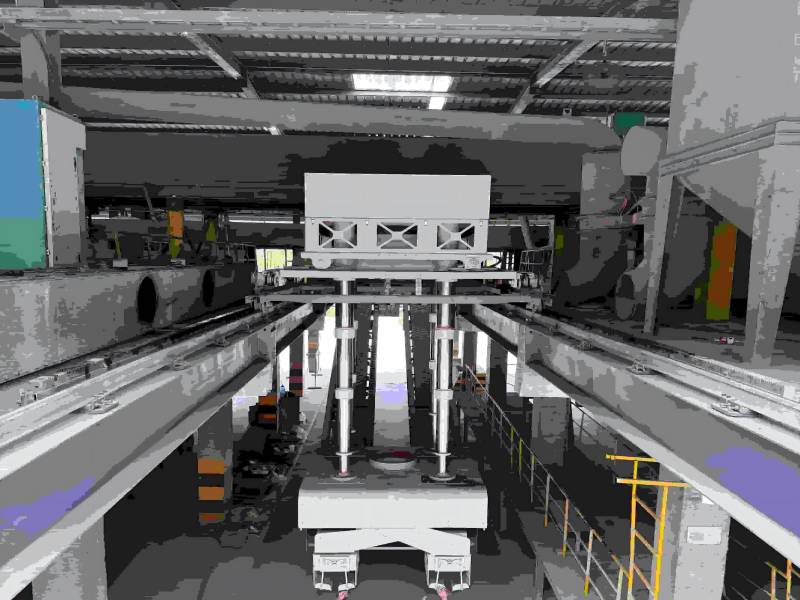
Sistema de escaneo de vehículos (escaneo 3D)
El sistema de escaneo 3D para cargadoras de vehículos Gachn Group no solo escanea e identifica la estructura del vehículo, sino que también escanea el tanque de combustible en la valla del compartimento delantero y las carpas enrolladas de algunos vehículos. Además, identifica los compartimentos con barras de amarre. Mediante cálculos internos del sistema, se genera la disposición correspondiente de los compartimentos que se deben ensacar, logrando así el cálculo automático de la carga secundaria.
Grupo de armarios de control y sensores:
El grupo de control y sensores del robot cargador incluye principalmente un gabinete con sistema de control de movimiento con pantalla LED, un gabinete con consola de operación de reinicio automático/manual con pantalla táctil, un sistema de visualización de decodificación de video integrado, audio, una cámara digital de alta definición en red, cableado específico para el robot, instrumentos de sensores (dispositivo de detección de identificación continua de paquetes, dispositivo de detección de entrada de paquetes, dispositivo de detección de subpaquetes, dispositivo de detección en el lugar), un sistema de refrigeración automática del gabinete de control y otros componentes. Esto permite la combinación de sistemas locales y en la nube, y la construcción de una plataforma inteligente para el cargador inteligente y una red 5G posibilita el intercambio de sistemas y la gestión jerárquica, proporcionando las condiciones para la construcción inteligente de plantas de cemento.
Software del sistema:
El software del sistema se divide principalmente en software de sistema integrado y software de lectura de tarjetas, y logra el objetivo de modelado inteligente y algoritmo de movimiento adaptativo.
El software del sistema integrado del robot cargador consta de software de escaneo, software de control de accionamiento, software de control automático del sensor de elevación, software de control automático de transporte, software de control del sistema de carga inteligente, software de control del sistema básico, software de control automático del cargador y otros sistemas de software. El sistema de software se basa en el software de control del sistema básico y el software de control de accionamiento, y coopera para completar el escaneo de información de la caja del vehículo (incluido el tensado), la elevación del eje Z, el movimiento de los ejes X e Y, la cinta transportadora, la carga inteligente, etc.
El software de lectura de tarjetas del robot de carga se divide en software de lectura de tarjetas y software de lectura de tarjetas de identificación, y ambos se utilizan conjuntamente. Cuando el vehículo lee la tarjeta correctamente dos veces, el ordenador interno convierte el peso de la carga en el número de bolsas cargadas, y esta información se importa al sistema de control del robot de carga mediante el software. En ese momento, el robot emite con precisión las instrucciones de carga correspondientes.
Efecto de la aplicación:
Como se observa en el resultado de la carga tras el uso del robot de carga por parte de nuestra empresa, este completó la arquitectura de plataforma en la nube del robot inteligente, logrando la combinación de la plataforma local y la plataforma en la nube, así como el servicio remoto inteligente y la posibilidad de compartir la carga. De esta manera, el usuario no solo puede solucionar las averías del robot en el sitio, sino que el fabricante también puede resolver de forma remota y rápida los problemas técnicos que surjan durante su uso.


La máquina automática de paletizado y carga de cemento ensacado del grupo Gachn cuenta con numerosas tecnologías patentadas.
La tecnología de carga segmentada propia de Gachn-JEENAR resuelve eficazmente el problema de la carga de vehículos demasiado largos.

La máquina automática de paletizado y carga de cemento ensacado Ganchn-JEENAR solo requiere un mantenimiento sencillo, lo que reduce los costos y el tiempo de mantenimiento.
La máquina paletizadora y cargadora de cemento ensacado GACHN-JEENAR ofrece una amplia adaptabilidad: maneja fácilmente todo tipo de camiones, incluidos los modelos de vía elevada.

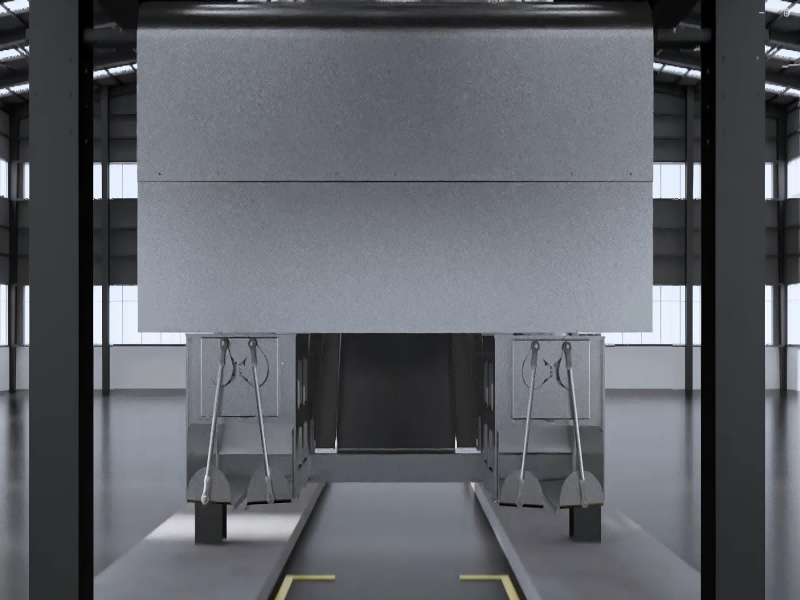
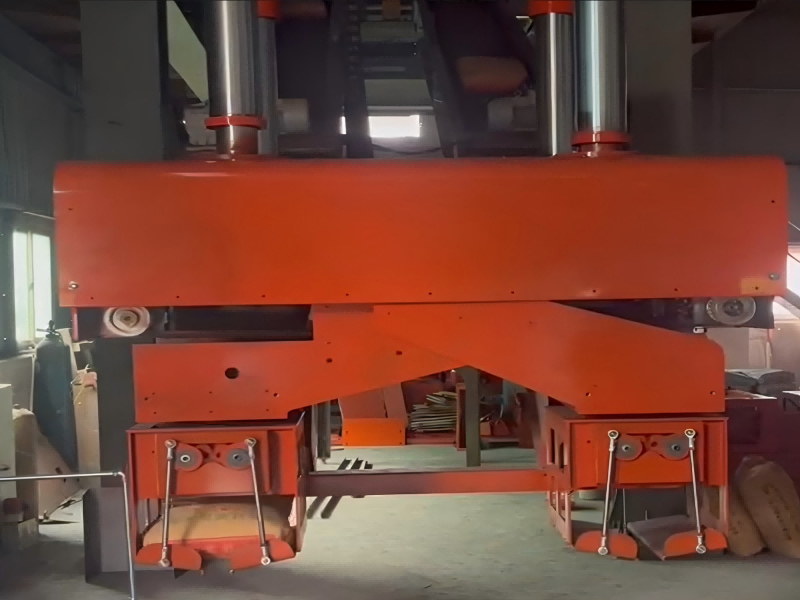
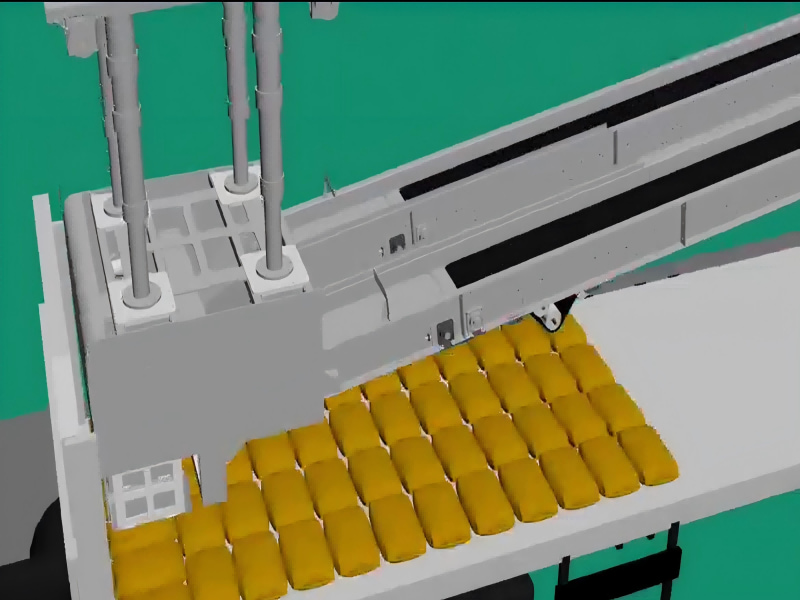
El cabezal de la máquina del sistema automático de carga de cemento ensacado del grupo Gachn se puede extender dentro del carro para apilar los sacos en una posición baja, reduciendo así el polvo y la rotura de los sacos.
La máquina de paletización y carga de bolsas Gachn cuenta con interacción de datos en tiempo real: se basa en la tecnología del Internet de las Cosas para lograr la recopilación y el análisis de datos en tiempo real.
Escaneo 3D del sistema automático de carga de cemento ensacado para todo tipo de vehículos.
Diseño de cabezal de doble ensacado Gachn-JEENAR: movimiento lateral libre, cerca del carro para el ensacado.
Suscríbete para recibir las últimas noticias. Mantente al día de las últimas tendencias.
 IPv6 RED COMPATIBLE 闽ICP备20010238号-3
IPv6 RED COMPATIBLE 闽ICP备20010238号-3